極座標による2重積分のとき,なぜ微小面積要素が \(dx\, dy \rightarrow rdr\,d\theta\) となるのか。
2次元極座標とヤコビアン
2点 \(P(x, y), \ Q(x + dx, y + dy)\) を考える。2点を結ぶベクトルは
$$ \overrightarrow{{PQ}} = dx \,\boldsymbol{i} + dy\, \boldsymbol{j}$$
ここで,\(\boldsymbol{i}, \ \boldsymbol{j}\) はデカルト座標系の基本ベクトル。
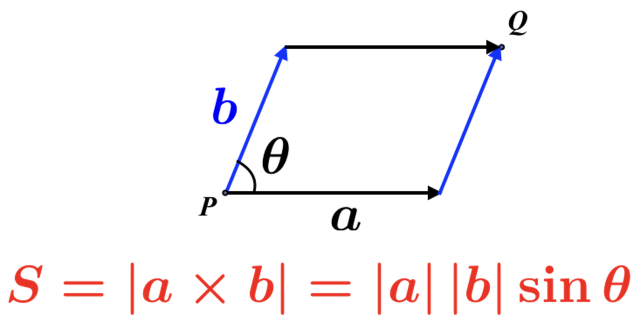
一般に,2つのベクトルから作られる平行四辺形の面積はベクトルの外積を使って書けるから,この \(\overrightarrow{{PQ}}\) を対角線とする平行四辺形の面積 \(S\) は
$$ S = |dx\, \boldsymbol{i} \times dy\, \boldsymbol{j}| = dx\,dy\,|\boldsymbol{k}| = dx\,dy$$
座標変換
\begin{eqnarray}x = x(r, \theta) = r\cos\theta, \quad y = y(r, \theta)=r\sin\theta
\end{eqnarray}
によって,
\begin{eqnarray}\overrightarrow{PQ} &=& dx \,\boldsymbol{i} + dy\, \boldsymbol{j}\\
&=& \left(\frac{\partial x}{\partial r} dr + \frac{\partial x}{\partial \theta} d\theta\right) \boldsymbol{i} +\left(\frac{\partial y}{\partial r} dr + \frac{\partial y}{\partial \theta} d\theta\right) \boldsymbol{j}\\
&=&dr \left(\frac{\partial x}{\partial r} \boldsymbol{i} + \frac{\partial y}{\partial r}\boldsymbol{j}\right) + d\theta \left(\frac{\partial x}{\partial \theta} \boldsymbol{i} + \frac{\partial y}{\partial \theta}\boldsymbol{j}\right) \\
&\equiv& dr \,\boldsymbol{e}_r + d\theta\, \boldsymbol{e}_{\theta}
\end{eqnarray}
したがって,\(\overrightarrow{PQ}\) を対角線とする微小平行四辺形の面積 \(dS\) を極座標で表すと,
\begin{eqnarray} dS &=& |dr\,\boldsymbol{e}_r \times d\theta\,\boldsymbol{e}_{\theta} |\\
&=& dr\,d\theta \left| \left(\frac{\partial x}{\partial r} \boldsymbol{i} + \frac{\partial y}{\partial r}\boldsymbol{j}\right)\times \left(\frac{\partial x}{\partial \theta} \boldsymbol{i} + \frac{\partial y}{\partial \theta}\boldsymbol{j}\right)\right|\\
&=& dr\,d\theta\left(\frac{\partial x}{\partial r} \frac{\partial y}{\partial \theta} – \frac{\partial y}{\partial r}\frac{\partial x}{\partial \theta}\right) |\boldsymbol{i} \times \boldsymbol{j}|\\
&=& dr\,d\theta\left(\frac{\partial x}{\partial r} \frac{\partial y}{\partial \theta} – \frac{\partial y}{\partial r}\frac{\partial x}{\partial \theta}\right) |\boldsymbol{k}|\\
&\equiv& dr\,d\theta \frac{\partial(x,y)}{\partial(r,\theta)}
\end{eqnarray}
ここで,$$ \frac{\partial(x,y)}{\partial(r,\theta)} \equiv
\begin{vmatrix}
\frac{\partial x}{\partial r} & \frac{\partial x}{\partial \theta}\\
\frac{\partial y}{\partial r} & \frac{\partial y}{\partial \theta}\\
\end{vmatrix}
= \frac{\partial x}{\partial r} \frac{\partial y}{\partial \theta} – \frac{\partial y}{\partial r}\frac{\partial x}{\partial \theta}$$ をヤコビアンという。
極座標への変換の場合はヤコビアンが以下のように計算できて
$$\frac{\partial(x,y)}{\partial(r,\theta)} = \cos\theta\cdot r\,\sin\theta – \sin\theta\,\cdot (-r\,\sin\theta) = r$$
最終的に
$$ dS = dx\,dy = \frac{\partial(x,y)}{\partial(r,\theta)} dr\,d\theta = r\, dr\,d\theta$$ となる。
一般の2次元の座標変換 $x = x(u,v), \ y = y(u, v)$ に対しても
$$ dS = dx\,dy = \frac{\partial(x,y)}{\partial(u,v)} du\,dv$$
ということで,ヤコビアンというものが,ベクトルの外積が面積になるのだということと,合成関数の偏微分の規則から理解することができた。
3次元の座標変換とヤコビアン
また,3次元の座標変換 $x = x(u,v,w), \ y = y(u, v,w), \ z = z(u,v,w)$ についても,3つの線形独立なベクトル $\boldsymbol{a}, \ \boldsymbol{b}, \boldsymbol{c}$ から作られる立体(平行六面体)の体積 $V$ が
$$ V = \boldsymbol{a}\cdot(\boldsymbol{b}\times\boldsymbol{c})$$
であることを使うと,微小体積要素 $dV$ が
$$ dV = dx\,dy\,dz = \frac{\partial(x,y,z)}{\partial(u,v,w)} du\,dv\,dw$$
となることが示される。
微小変位ベクトル
$$d\boldsymbol{r} = dx \,\boldsymbol{i} + dy\,\boldsymbol{j} + dz\,\boldsymbol{k}$$
3本の(線形独立な)ベクトル $dx\, \boldsymbol{i}, \ dy\, \boldsymbol{j}, \ dz\,\boldsymbol{k}$ からつくられる微小な平行6面体の体積 $dV$ は
\begin{eqnarray}
dV &=& \left(dx\, \boldsymbol{i} \right) \cdot \left( \left(dy\, \boldsymbol{j} \right)\times\left(dz\,\boldsymbol{k} \right)\right) \\
&=& dx\,dy\, dz\, \boldsymbol{i} \cdot(\boldsymbol{j}\times\boldsymbol{k}) \\
&=& dx\,dy\, dz\, \boldsymbol{i} \cdot \boldsymbol{i} \\
&=& dx\,dy\, dz
\end{eqnarray}
一方,座標変換
\begin{eqnarray}
x &=& x(u, v, w) \\
y &=& y(u, v, w) \\
z &=& z(u, v, w) \\
\end{eqnarray}
により,全微分は
\begin{eqnarray}
dx &=& \frac{\partial x}{\partial u} du + \frac{\partial x}{\partial v} dv +\frac{\partial x}{\partial w} dw \\
dy &=& \frac{\partial y}{\partial u} du + \frac{\partial y}{\partial v} dv +\frac{\partial y}{\partial w} dw \\
dz &=& \frac{\partial z}{\partial u} du + \frac{\partial z}{\partial v} dv +\frac{\partial z}{\partial w} dw \\
\end{eqnarray}
となるから,微小変位ベクトルは以下のように書くことができる。
\begin{eqnarray}
d \boldsymbol{r}&=& dx \,\boldsymbol{i} + dy\,\boldsymbol{j} + dz\,\boldsymbol{k} \\
&=& \ \ \ \left(\frac{\partial x}{\partial u} du + \frac{\partial x}{\partial v} dv +\frac{\partial x}{\partial w} dw \right)\boldsymbol{i} \\
&& + \left(\frac{\partial y}{\partial u} du + \frac{\partial y}{\partial v} dv +\frac{\partial y}{\partial w} dw \right) \boldsymbol{j} \\
&& + \left(\frac{\partial z}{\partial u} du + \frac{\partial z}{\partial v} dv +\frac{\partial z}{\partial w} dw \right) \boldsymbol{k} \\
&=& du\, \boldsymbol{e}_u + dv\,\boldsymbol{e}_v + dw\, \boldsymbol{e}_w
\end{eqnarray}
ここで,
\begin{eqnarray}
\boldsymbol{e}_u&\equiv& \frac{\partial x}{\partial u} \boldsymbol{i} + \frac{\partial y}{\partial u} \boldsymbol{j} + \frac{\partial z}{\partial u} \boldsymbol{k} \\
\boldsymbol{e}_v&\equiv& \frac{\partial x}{\partial v} \boldsymbol{i} + \frac{\partial y}{\partial v} \boldsymbol{j} + \frac{\partial z}{\partial v} \boldsymbol{k} \\
\boldsymbol{e}_w&\equiv& \frac{\partial x}{\partial w} \boldsymbol{i} + \frac{\partial y}{\partial w} \boldsymbol{j} + \frac{\partial z}{\partial w} \boldsymbol{k}
\end{eqnarray}
ということで,体積要素 $dV$ は3本のベクトル $du\, \boldsymbol{e}_u,\ dv\,\boldsymbol{e}_v, \, dw\, \boldsymbol{e}_w$ からつくられる平行6面体の体積としても表されるから
\begin{eqnarray}
dV = dx\,dy\,dz = du\,dv\,dw \, \boldsymbol{e}_u \cdot(\boldsymbol{e}_v \times\boldsymbol{e}_w)
\end{eqnarray}
ベクトルのスカラー三重積は,3つのベクトルの成分を並べた $3\times 3$ 行列の(転置行列でも可)の行列式と等しいことはここでわかっているので
\begin{eqnarray}
\boldsymbol{e}_u \cdot(\boldsymbol{e}_v \times\boldsymbol{e}_w)
&=& \det \begin{pmatrix}
\frac{\partial x}{\partial u} & \frac{\partial y}{\partial u} & \frac{\partial z}{\partial u} \\
\frac{\partial x}{\partial v} & \frac{\partial y}{\partial v} & \frac{\partial z}{\partial v} \\
\frac{\partial x}{\partial w} & \frac{\partial y}{\partial w} & \frac{\partial z}{\partial w}
\end{pmatrix} \\
&=&
\det \begin{pmatrix}
\frac{\partial x}{\partial u} & \frac{\partial x}{\partial v} & \frac{\partial x}{\partial w} \\
\frac{\partial y}{\partial u} & \frac{\partial y}{\partial v} & \frac{\partial y}{\partial w} \\
\frac{\partial z}{\partial u} & \frac{\partial z}{\partial v} & \frac{\partial z}{\partial w}
\end{pmatrix} \\
&=& \frac{\partial(x,y,z)}{\partial(u,v,z)}
\end{eqnarray}
したがって,
\begin{eqnarray}
dV = dx\,dy\,dz = \frac{\partial(x,y,z)}{\partial(u,v,z)} du\,dv\,dw
\end{eqnarray}
円筒座標とヤコビアン
\begin{eqnarray}
x &=& \rho \cos\phi \\
y &=& \rho \sin\phi \\
z &=& z
\end{eqnarray}
$$\frac{\partial(x,y,z)}{\partial(\rho, \phi, z)} =\frac{\partial(x,y)}{\partial(\rho, \phi)} = \rho$$
したがって
$$dV = \frac{\partial(x,y,z)}{\partial(\rho, \phi, z)} d\rho\,d\phi\, dz = \rho\, d\rho\,d\phi\, dz$$
極座標とヤコビアン
\begin{eqnarray}
x &=& r \sin\theta \cos\phi \\
y &=& r \sin\theta \sin\phi \\
z &=& r \cos\theta \\
\end{eqnarray}
$$\frac{\partial(x,y,z)}{\partial(r, \theta, \phi)} = r^2 \sin\theta$$
したがって
$$dV = \frac{\partial(x,y,z)}{\partial(r, \theta, \phi)} dr\, d\theta\, d\phi = r^2 dr\, \sin\theta\, d\theta\, d\phi$$
Maxima-Jupyter でヤコビアンの計算
2次元極座標とヤコビアン
\begin{eqnarray}
x &=& r\cos\phi \\
y &=& r\sin\phi
\end{eqnarray}
x: r * cos(phi);
y: r * sin(phi);
Maxima の jacobian() は「関数行列」であり,「関数行列式」にするにはさらに determinant() をとる必要がある。
determinant(jacobian([x,y], [r,phi]))$
trigsimp(%);
3次元円筒座標とヤコビアン
\begin{eqnarray}
x &=& \rho \cos\phi \\
y &=& \rho \sin\phi \\
z &=& z
\end{eqnarray}
x: rho * cos(phi);
y: rho * sin(phi);
determinant(jacobian([x,y,z], [rho,phi,z]))$
trigsimp(%);
3次元極座標とヤコビアン
\begin{eqnarray}
x &=& r\sin\theta \cos\phi \\
y &=& r\sin\theta \sin\phi \\
z &=& r \cos\theta
\end{eqnarray}
x: r * sin(theta) * cos(phi);
y: r * sin(theta) * sin(phi);
z: r * cos(theta);
determinant(jacobian([x,y,z], [r,theta,phi]))$
trigsimp(%);